

Gabriel Aguiar Noury
on 11 December 2021
Learning how to fly. Again. Because certain technologies and processes can always be optimized. Take laptops, for instance (I always wanted to become a laptop designer!). From foldable screens to computers that incorporate e-readers, we are always pushing for new designs that address ergonomic requirements but also improve the way we work.
We are doing the same with drones. This month features innovations that dare to challenge the status quo of how we fly.
The seat belt sign is on, and we’re cleared for takeoff. Let’s go!
ROS CVE alert – ensuring security for robotics
We mentioned this in our previous newsletter, but to increase awareness, we’ll repeat it this month, too. Early in October 2021, Open Robotics registered a CVE security vulnerability that affects ROS Kinetic, Melodic, and Noetic.
If you are working with any of these ROS distributions, act now. You can find information on what you should do here.
Four wings are just overrated
When we think of drones, we instantly picture four propellers in a square formation. But since humankind dared to fly, it has proposed visionary designs to leverage aerodynamics. It has been inspired by nature, from insects’ evolution to conquer the sky to trees in their never-ending quest for survival. Do you want to see how? This month brings 3 drones that will inspire you while teaching you how to fly.
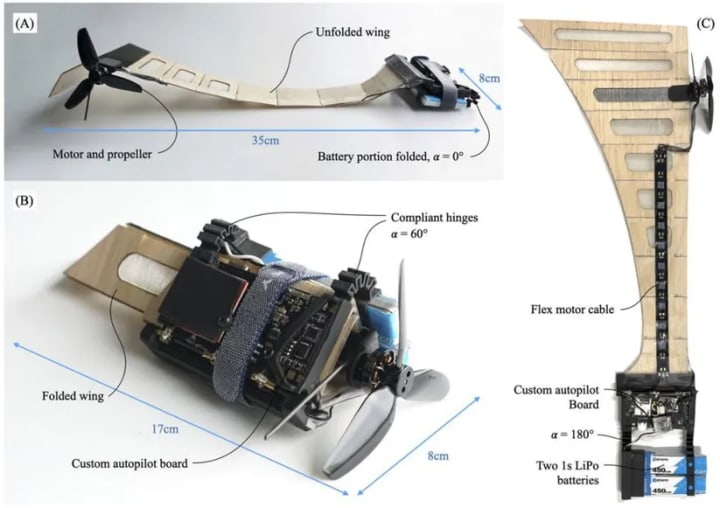
F-SAM – when all you need is one wing
Maple trees are the source of inspiration behind this drone. To be more precise, their seeds – samara seeds. If you Google it, you will find countless videos of these seeds that incorporate what can be called a single-wing. You will also find dedicated videos that study the aerodynamics behind the seed pods’ spin-down process.
This design is what F-SAM wants to accomplish. F-SAM stands for “Foldable Single Actuator Monocopter,” a monocopter designed by the Singapore University of Technology & Design. It uses just one single actuator for control, which gives complete directional control. Yes, keeping its precision is the challenge. Directional control requires repetitive pulsing of the motor at a point during the aircraft’s spin when it’s pointed in the direction you want it to go.

But what are the advantages of this design? Well, let’s not mention its affordability, ease of transport, and ease of repair (although we just did). Instead, let’s talk about its inherently stable design. F-SAM spins all by itself in a stable and predictable way. This means that if there is an update problem, or the battery dies, it’ll just spin gently down like a samara seed. (If it’s your first time thinking about update failures, check this feature of Ubuntu Core.)
No wings, no problem
From one to none. DOCOMO shows that sometimes you don’t even need wings or a propeller to fly. This drone resembles an aerostat but indoors. Like a blimp or hot air balloon, it is also filled with a noble gas, helium, to stay aloft. But it’s propelled by ultrasonic vibrations that move air, allowing the drone to go up and down, right and left.

The module makes little noise with its minute vibrations and is safe to touch, so even if the drone were to collide with a person or an object, serious injury or damage would be highly unlikely. As such, the drone is ideal for indoors.
But seriously, look at that glow! Now imagine an event such as a concert, party or spa retreat – this type of drone could seriously set the mood for attendees. It also comes with a camera, unlocking the usual benefits for autonomy, operation, and monitoring.
Flying like a beetle
Plants are not our only source of inspiration. Animals and insects also play a role in engineering – in this case, beetles. Elytra, the hard coverings that protect beetles’ folded wings, inspired the multimodal drone robotic Elytra. We have all seen this mechanism at work. When they are ready to fly, their wings unfold from their case, which caps and shields them while moving over terrain. The same principle applies for the robotic Elytra.
Capable of aerial and terrestrial locomotion, Elytra benefits from protective systems that prevent damage to its delicate aerial mechanisms. The proposed structure consists of adding an additional set of retractable wings (the “elytra”), which can rapidly encapsulate the main folding wings when protection is needed. This system mitigates added weight and drag, increasing lift generation and stall delay at high angles of approach.
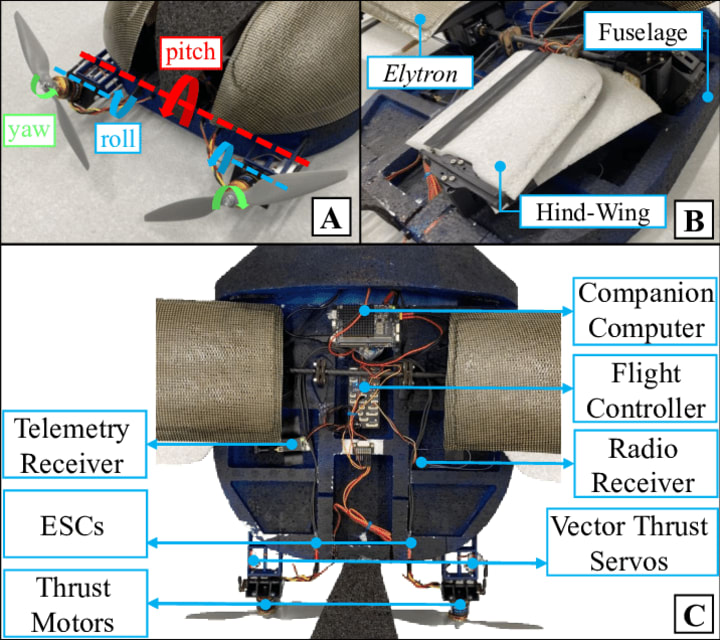
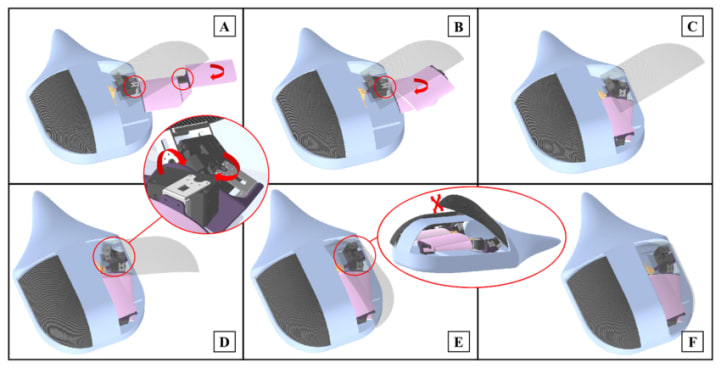
Here is how the system works as described in their paper:
- The outer section of the hind-wing starts folding on top of the inner hind-wing section by enabling a one DoF actuator.
- In less than 0.2 seconds, the one DoF actuator in the root of the hind-wing initiates folding of the whole wing section on top of the fuselage compartment.
- Before the completion of the hind-wing folding, the 2 DoF actuators of the elytron operate simultaneously.
- The elytron starts approaching the fuselage.
- The elytron folds on top of the hind-wing and thus fully encloses it within the compartment that the concave elytron surface and the fuselage create.
- Similar to beetles, the hind-wing now is completely enclosed and geometrically isolated from its surroundings, and thus ready for ground locomotion.
A wheeled robot, as versatile as a swiss knife
Last month we talked about Leo, the bipedal drone. Today, we bring you another hybrid robot that unlocks 3 different sets of configurations; ANYmal. This robot comes from ETH Zürich’s Robotic Systems Lab and is now commercially pursued by its spin-out, the Swiss-Mile company.

The robot can operate as a mobile wheeled robot, a quadruple robot, and a humanoid robot. With this, it can efficiently overcome flat terrains, go over obstacles like steps and stairs, and carry heavy payloads in indoor and outdoor spaces.
Swiss-Mile is focusing on commercial tasks that require a unique combination of speed and obstacle traversal, like mapping or inspecting complex spaces. Wheel-legged robots could be used for a wide variety of tasks, including mapping, inspection, disaster relief, and logistics in urban environments, to name a few.
Cyberdog, powered by Ubuntu
You probably saw Xiaomi’s Cyberdog, but did you know it’s running Ubuntu? Yes, Xiaomi is also powering their new range of robotics devices with open source, as they aim to provide the industry and researchers with an affordable and powerful four-legged robot.
Learn more about Cyberdog in our spotlight blog.

Open source robotics – white papers
Ok, here is an unpopular opinion for 2022: Docker doesn’t solve it all. On the contrary, it was designed and is maintained for one main application: elastic cloud operations. That is how it became a thing, and that is how Docker Inc has been driving its roadmap.
But because we didn’t have anything better, we started using it for anything and everything. It became our hammer for fixing nails, but we also use it for polishing surfaces, cutting boards, drilling holes, and embedding applications on edge devices. It’s an overstep, an unsupported overstep.
Wait, are we telling you that there is another way? Yes, there is. It’s called “containers designed for embedded devices.” Yes, there are containers for this.
So if you dare to reinvent how we fly, you will love this ROS & Docker whitepaper.
Open source robotics – video news
Another month, another video. More news, more applications, more robots!
And if you want to feature your robotics application, just send us an email at robotics.community@canonical.com.
Open-source robotics – tutorial
This month, we bring two tutorials to help onboard developers and enthusiasts alike.
The first is a tutorial about Groot, a companion application of the BehaviorTree.CPP library that is used to create, edit and visualise behaviour trees.
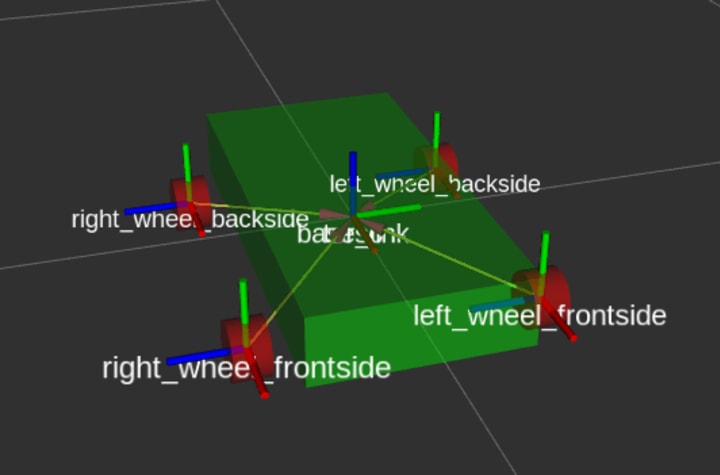
The second is how to create a Robot Simulation Model for ROS using URDF files, a self-contained specification of the robot.
So schedule some time to keep learning – and don’t forget to thank the authors. Thank you for your contribution!
Stay tuned for more robotics news
As always, we would love to learn from you. Send us a summary of your robotics innovation and project to robotics.community@canonical.com, and we will share it in our next robotics newsletter or monthly video. Thanks for reading!


